Энциклопедия 3ds max 6
К двум костям из...
Рис. 19. 40. К двум костям из системы костей, имитирующих ногу, применен контроллер обратной кинематики. Стрелкой показан анимируемый объект Goal (цель) в виде перекрестья
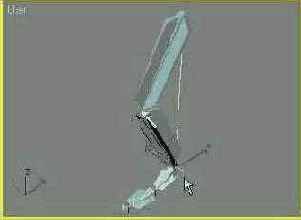
В окнах проекций контроллер обратной кинематики, не зависящий от предыстории, изображается в виде линий белого цвета, проходящих вдоль осей тех костей, которые охвачены действием контроллера. Еще одна линия, проходящая от конца последней дочерней кости, охваченной контроллером, к началу первой родительской кости, как бы замыкает цепь действия контроллера. Плоскость, в которой лежит образованный этими линиями треугольник, называется плоскостью сгиба {swivel plane).
На конце младшей из охваченных контроллером дочерних костей изображается в виде перекрестья (синего цвета, если не выделен) объект, носящий имя Goal (Цель), показанный стрелкой на рис. 19. 40. Именно этот объект и следует перемещать или анимировать, чтобы привести в движение цепочку костей, охваченных действием контроллера. Весь набор элементов контроллера носит имя IK Chain (IK-цепочка).
Действие IK-решения состоит в том, что программа стремится совместить с объектом-целью концевой эффектор {end effector) системы костей. Концевым эффектором фактически является опорная точка самой младшей дочерней кости, охваченной действием IK-це-почки. В окнах проекций концевой эффектор по умолчанию не изображается, но если включить его показ (см. далее раздел «Настройка параметров контроллера IK-solver»), то он отображается в виде перекрестья зеленого цвета.
При перемещении объекта-цели вся система костей, охваченных действием контроллера, будет поворачиваться относительно опорной точки старшей из управляемых контроллером костей. В нашем примере такой является корневая кость 1, которая будет поворачиваться вокруг своего начала. Пара связанных костей 1 и 2 будет стремиться принять положение, соответствующее новой позиции объекта-цели. Изгиб в суставе между костями 1 и 2, управляемыми контроллером обратной кинематики, будет происходить в плоскости, проходящей через белые линии контроллера. По умолчанию сгибы суставов системы костей происходят в плоскости того окна проекции, в котором создавались кости. Остальные дочерние кости с номерами 3-5 будут «подтягиваться» за объектом Goal (Цель), следуя правилам прямой кинематики.
К одной и той же цепочке костей можно применить несколько IK-решений, зоны действия которых могут даже перекрываться. Например, на рис. 19. 41 показана цепочка костей, к которой применены два IK-решения: первое - к костям 1 и 2, если следовать обозначениям, принятым на рис. 19. 40, и второе - к костям 3-5. В этом случае при перемещении одного из объектов Goal (Цель) второй сохраняет свое текущее положение, стремясь удерживать управляемые им кости.